
Устройство и характеристики шагового двигателя
Шаговый двигатель – это бесколлекторный синхронный электродвигатель с несколькими обмотками. В ходе его работы электрический ток подается на обмотку статора, что влечет за собой фиксацию ротора. Активация обмоток двигателя происходит последовательно, благодаря чему вызываются угловые дискретные перемещения ротора, также называемые шагами. Поэтому шаговые двигатели и получили такое название. Этот двигатель имеет достаточно сложную конструкцию, а также непростую систему управления (по сравнению с обычным коллекторным двигателем). Чтобы управлять данным оборудованием, необходимо переключать уровень напряжения в обмотках и одновременно контролировать ток, причем делать это в определенной последовательности. Для точного и оперативного управления ШД применяются специальные устройства – драйверы шаговых двигателей.
Разновидности шаговых двигателей
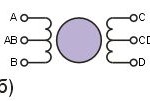
На сегодняшний день, существуют биполярные и униполярные шаговые двигатели, которые различаются между собой конфигурациями их обмоток. В частности, у биполярного двигателя в каждой фазе находится одна обмотка. Направление ее магнитного поля меняется (переполюсовывается) драйвером. Всего у биполярного двигателя 2 обмотки и 4 вывода. Что же касается униполярного двигателя, то в фазе у этой модели также находится одна обмотка, однако от ее середины сделан отвод. Это позволяет управлять двигателем несколько по-другому. Благодаря этому свойству можно менять направление магнитного поля обмотки более простым способом – обычным переключением ее частей. Также различным может быть количество выводов – у униполярных шаговых двигателей их может быть 5 или 6, так как средние выводы обмоток иногда объединяются прямо внутри двигателя. В некоторых случаях у этих шаговых двигателей есть раздельные четыре обмотки, из-за чего их по ошибке называют четырехфазными двигателями. Однако каждая обмотка обладает отдельными выходами, общее количество которых, соответственно, 8. Если соединить обмотки соответствующим образом, то их можно использовать как биполярные или же униполярные.
Особенности шаговых двигателей
Данная техника обладает определенными особенностями, самые важные из которых перечислены ниже:
• Ограниченная точность установки ротора
Большинство производимых на сегодняшний день шаговых двигателей обладают определенной погрешностью при установке ротора – в размере 5% (плюс-минус) от величины шага. Например, если шаг двигателя составляет 1.8 градусов, то его погрешность будет равна 5.4 минутам. При практическом применении двигателя, во время дробления шага 1:10, его величина будет полностью равной погрешности в установке, и более точное перемещение не будет обеспечено большими делениями. Единственное, что можно сделать с их помощью – это увеличить плавность работы шагового двигателя.
• Дискретность перемещений
Это главная характеристика ШД, которая является основой для остальных его качеств. Суть ее заключается в том, что для большинства роторов свойственно делать 200-400 шагов на один оборот, однако шаговые двигатели имеют особенную конструкцию, которая делает возможной фиксацию ротора в промежуточных положениях. Таким образом, эти двигатели демонстрируют более высокие показатели – до 800-1000 и даже больше шагов на оборот.
• Обратная зависимость крутящего момента от скорости
Как известно, величина крутящего момента, умноженная на скорость движения вала шагового двигателя – это постоянная величина. Чем больше скорость вращения, тем, соответственно, ниже показатели крутящего момента на валу.
• Резонанс ШД
Явление резонанса появляется в шаговом двигателе, благодаря периодичности и дискретности усилий, которые прикладываются к его ротору. Это явление однозначно является негативным и оно возникает абсолютно во всех ШД, в виде падения крутящего момента, появления гула и вибраций. Причина появления резонанса в данном случае – это совпадения частоты шагов с собственной частотой ротора двигателя. Резонанс может привести к снижению синхронности работы, пропуску шагов или даже полной остановке двигателя. Чтобы устранить эту неприятность, мы рекомендуем использовать современные контроллеры шаговых двигателей с функцией подавления резонанса.
Преимущества шаговых двигателей
• С запитанными обмотками, ШД способен обеспечить полный крутящий момент в режиме остановки.
• Число импульсов, поданных на двигатель, определяют угол поворота ротора.
• Погрешность (3-5% от величины шага) является повторяемой и не накапливается от одного шага к другому.
• В ШД существуют функции быстрого старта/реверсирования/остановки.
• В данной модели двигателя отсутствуют щетки, что обеспечивает ему достаточно высокую надежность. Срок службы этого механизма фактически зависит от срока службы подшипников.
• Зависимость положения двигателя от входных импульсов помогает достигнуть позиционирования без обратной связи.
• Шаговые двигатели позволяют получить крайне низкую скорость вращения для нагрузки, которая присоединена без редуктора напрямую к валу двигателя.
• Широкий скоростной диапазон
• Невысокая стоимость (по сравнению с сервоприводами).

Недостатки шаговых двигателей
• Явление резонанса (его помогают устранить современные драйверы шаговых двигателей).
• Потеря крутящего момента и стабильности работы на высоких скоростях
• Всегда существует вероятность пропуска шагов – и из-за отсутствия обратной связи это часто приводит к потере контроля положения.
• Не очень высокая удельная мощность.
тэги:
| направляющие самодельного станка c чпу |
| станки с чпу |
| самодельный станок с чпу |
| самодельный станок с сервоприводом |
| самодельный станок |
| электродвигатели с отрицательным наклоном характеристики |
| самодельные станки |
| каретка для лазерного гравера |
| рельсовые направляющие лазерного гравера |
| шаговый двигатель огромных размеров |
| самодельные направляющие скольжения |
| чпу контроллеры для биполярного двигателя схема |
| схема чпу контроллера для биполярного двигателя |
| резонанс в шд |
| самодельный приспособы для металлорежущих станков |
| контроллер шагового двигателя step dir на pic |
| самодельный контроллер чпу |
| самодельные линейные направляющие |
| самодельные направляющие и линейные механизмы |
| шпинднль длч самодельного чпу |
| как уменьшить вибрацию чпу станка |
| линейный подшипник |
| электродвигатель постоянного тока для станка чпу |
| линейные направляющие на самодельный cnc |
| как работает компенсатор среднечастотного резонанса |
| самодельные вальцы |
| как подобрать шпиндель станок 6а54 |
| шпиндель преобразователь частоты |
| блок питания для станка чпу |
| двигатель начинает пропускать шаги до полной остановки |
| какие направляющие для чпу станка выбрать |
| тяговой коллекторного электродвигателя постоянного тока |
| продаю самодельный станок с чпу |
| самодельный чпу фрезерный станок с длинной х рамой |
| станок чпу |
| микросхемы управления шд |
| домашний чпу станок |
| гравировальный станок |
| самоделки с шаговым двигателем |
| крепление под шаговые двигатели |
| самодельная направляющая |
| переделка синхронного двигателя в шаговый |
| cnc каретка люфт |
| схемы передач шестерня рейка для станка с чпу |
| направляющие скольжения b rfxtybz xnj ghtlgjxnbntkmytq |
| самодельные частотные преобразователи схемы 1 фаза 3 фазы |
| протокол управления step/dir/enable |
| каретки и направляющие |
| шаговые двигатели управление |
| самодельный драйвер-контроллер шагового двигателя |
| выбор швп наибольшая длина |
| линейные направляющие для cnc |
| направляющие из нержавейки |
| драйвер шаговых двигателей чпу |
| синхронизация чипов l297 |
| самодельный контроллеры к шаговым двигателем из l297 и l298 |
| уход за шпинделем |
| самодельные линейные направляющие на подшипниках |
| направляющие для самодельного чпу |
| самодельные электродвигатели с внешним ротором |
| гибридные шаговые двигатели |
| линейные направляющие самодельные |
| линейные направляющие виды |
| каретки для направляющих станочков с чпу |
| прецизионные круглые направляющие |
| примеры для kcam |
| обмотки электродвигателя постоянного тока |
| сигналов step dir enable шагового двигателя |
| креслення чпу станка |
| самодельный драйвер для шагового двигателя |
| чертежи самодельного копировально-гравировального станка |
| модульное построение станков с чпу |
| вал прецизионные для чпу |
| настольный фрезерный станок литая рама |
| актуаторы для постройки чпу станка |
| рельсовые направляющие качения |
| домашний чпу |
| круглые направляющие |
| рельсовые направляющие скольжения |
| шаговые двигатели для самодельного станка с чпу |
| tb6560 схема подключение |
| типы круглых направляющих |
| причина пропуска шагов шд ток напряжение |
| самодельные каретки |
| cnc controller for stepper motors napisanie driverov книги |
| самодельная шпиндельная головка |
| обычный двигатель в чпу |
| расточная головка |
| комплектующие для чпу |
| самодельный станок для печатных плат |
| архитектурное построение учпу |
| самодельный станок по дереву |
| направляющие на самодельных станках |
| 5 я ось на чпу |
| самодельный чпу из универсального станка |
| самодельный гравер |
| редуктор поворотной оси самодельного фрезерного станка |
| самодельный чпу станок размеры на фото |
| рабочий стол станка определение |